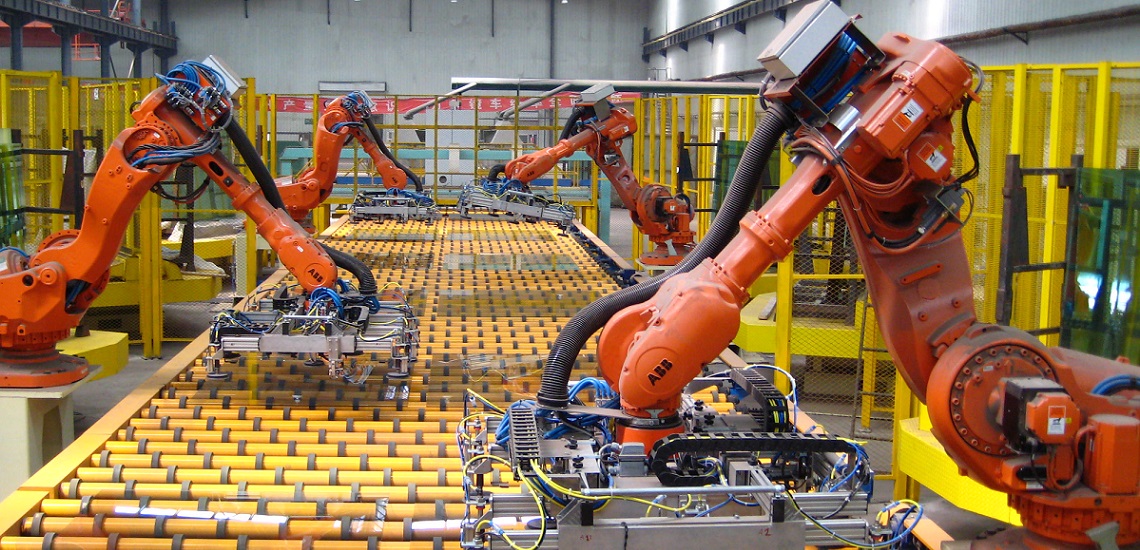
No se puede negar que este es uno de los planos que más beneficiado se ha visto por el uso de la robótica, y algunas actividades en las que juega un papel fundamental son:
Transporte de materiales
Montaje
Corte mecánico, rectificado, desbardado y pulido
Pintura
Manipulación de plásticos y otros materiales
Tareas peligrosas como soldaduras, implementación de sustancias inhalantes nocivas, transporte de materiales pesados.
Los grados de libertad de un manipulador robotizado son determinados por el número de eslabones y de articulaciones, que relacionan estos eslabones.
Estructura de un manipulador.
Elementos Motrices o Actuadores
Son los encargados de producir el movimiento de las articulaciones, ya sea en forma directa o por medio de cables, poleas, cadenas, etc. Se clasifican en tres grandes grupos:
Neumáticos.
Emplean aire comprimido como fuente de energía y son adecuados en el control de movimientos rápidos, pero su precisión es limitada.
Hidráulicos.
Los actuadores hidráulicos son recomendables en los manipuladores que tiene una gran capacidad de carga, junto a una precisa regulación de velocidad.
Eléctricos.
Los motores eléctricos son los más utilizados, gracias a su precisión y la facilidad de control.
El Controlador
Es el dispositivo encargado de regular el movimiento de todos de los elementos del manipulador, y de realizar los cálculos y procesado de la información. La complejidad del control varía según los parámetros que se gobiernan.
Efector Terminal
Es la garra o herramienta que se le acopla a la muñeca del manipulador, siendo el encargado de materializar el trabajo previsto; por ejemplo, éste puede ser una tenaza, un electroimán, o algún otro aparato. En general, y de acuerdo al tipo de aplicación, la problemática del efector terminal radica en que éste ha de poseer una elevada capacidad de carga y al mismo tiempo es importante que tenga un peso y tamaño reducido. Por esto, en muchas ocasiones es necesario diseñar el efector terminal de acuerdo a los requerimientos de la aplicación en que se utilizará.
Sensores de Información
Los robots inteligentes son aquellos capaces de adaptarse al ambiente y tomar decisiones en tiempo real, adecuadas para cada situación. La información que ellos reciben les hace autoprogramables, es decir, alteran su actuar en función de la situación externa, lo que los hace poseer un cierto grado de inteligencia artificial. A este respecto, las informaciones más solicitadas por los robots son las que hacen referencia a la posición, velocidad, aceleración, fuerzas, pares, dimensiones y contornos de objetos, y temperatura.
Fanuc ofrece una serie de opciones de software específicas para aplicaciones:
Collision Guard (Detección de Colisión Ultrasensible) proporciona un método sensible que detecta que un robot ha colisionado con un objeto. Puede detectar una colisión más rápido que una función de detección de colisión convencional, de esta manera se reducen los posibles daños en la herramienta y en el mismo robot.
Con la identificación de la capacidad de carga (Payload ID) el robot oscila la carga moviendo el eje de la muñeca y la información de capacidad de carga se configura automáticamente. El resultado de la identificación de la capacidad de carga puede ser usado para configurar el Collision Guard.
Con Collision Skip el robot es capaz de detectar cuando toca un objeto y adapta inteligentemente su movimiento. La detección se lleva a término sólo por el servo control del robot. La reacción del robot puede ser fácilmente programada utilizando high speed skip.
Softfloat se utiliza en procesos para compensar variaciones inesperadas. Cuando suceden estas variaciones, Softfloat permite cambiar la trayectoria del robot de acuerdo a la fuerza externa para alcanzar los resultados deseados.
Coordinated Motion Package, función de movimiento coordinado permite que el robot siga el movimiento de un posicionador que esté sosteniendo una pieza de trabajo. El movimiento de la herramienta del robot es controlado en relación a la pieza de trabajo en el posicionador.
No hay duda de que actualmente la programación y la robótica están cada vez más presente en nuestro sistema educativo en todos sus niveles, desde la Educación Infantil hasta la Enseñanza Universitaria.
Lo que se conoce como Robótica EducaTiva es un método de aprendizaje basado en la corriente pedagógica del constructivismo que tiene como objetivo el diseño, ensamble y puesta en funcionamiento de creaciones propias.
Permite desarrollar conocimientos tanto científicos como tecnológicos, así como de otras disciplinas con las que se encuentra estrechamente relacionada. En particular se emplea , acrónimo en inglés de Science, Technology, Engineering and Mathematics, en la que se tratan estas cuatro grandes áreas de conocimiento de manera integrada en lugar de como áreas de conocimiento independientes.
Como recurso educativo, la programación de robots, permite trabajar en el aula aspectos como la creatividad, el pensamiento lógico, capacidades organizativas, desarrollo de la psicomotricidad fina, aprendizaje basado en proyectos, resolución de problemas o el fomento del trabajo colaborativo.
Muchos de los kits para iniciarse en la electrónica y programación de robots destinados a la educación están basados en Arduino. De este modo, los estudiantes pueden adentrarse en la robótica gracias a este software y hardware de desarrollo libre
El concepto de máquinas automatizadas se remota a la antigüedad, con mitos de seres mecánicos vivientes. Los autómatas, o máquinas semejantes a personas, ya aparecían en los relojes de las iglesias medievales, y los relojeros del siglo XVIII eran famosos por sus ingeniosas criaturas mecánicas. Algunos de los primeros robots empleaban mecanismos de realimentación para corregir errores, mecanismos que siguen empleándose actualmente. Un ejemplo de control por realimentación es un bebedero que emplea un flotador para determinar el nivel del agua. Cuando el agua cae por debajo de un nivel determinado, el flotador baja, abre la válvula y deja entrar más agua en el bebedero. Al subir el agua el flotador también sube, y al llegar a cierta altura se cierra la válvula y se corta el paso del agua. El primer auténtico controlador realimentado fue el regulador de Watt, inventado en 1788 por el ingeniero británico James Watt. Este dispositivo constaba de dos bolas metálicas unidas al eje motor de una máquina de vapor y conectadas con una válvula que regulaba el flujo de vapor., ninguna de estas máquinas tenía la versatilidad del brazo humano, y no podían alcanzar objetos alejados y colocarlos en la posición deseada.El desarrollo del brazo artificial multiarticulado, o manipulador, llevó al moderno robot.
El inventor estadounidense George Devol desarrolló en 1954 un brazo primitivo que se podía programar para realizar tareas específicas. En la década de 1970 los robots se difundieron en muchos otros sectores industriales, desde la industria mecánica a la electrónica, tanto así que ya se emplean en las más variadas tareas, sueldan y pintan automóviles, embalan materiales y objetos, alzan pesadas cargas, atornillan y desatornillan tuercas, sueldan circuitos. En 1975, el ingeniero mecánico estadounidense Victor Scheinman, cuando estudiaba la carrera en la Universidad de Stanford, en California, desarrolló un manipulador polivalente realmente flexible conocido como Brazo Manipulador Universal Programable (PUMA, siglas en inglés). El PUMA era capaz de mover un objeto y colocarlo en cualquier orientación en un lugar deseado que estuviera a su alcance. El concepto básico multiarticulado del PUMA es la base de la mayoría de los robots actuales. La investigación en este campo ha dado pasos de gigante en los últimos años, ya que se están trabajando en robots, para emplearlos en asistencia a minusválidos, en intervenciones de los primeros auxilios en lugares inaccesibles o en la eventualidad de catástrofes ambientales. Este último es el caso de la telerrobótica, sector de investigación nacido en los últimos años con el objeto de estudiar y desarrollar robots que puedan ser controlados a distancia. De todos modos, ya en 1979, en Estados Unidos, tras el accidente nuclear de Three Mile Island se utilizaron robots para retirar los desechos radiactivos.
Losrobots son capaces de realizar tareas repetitivas de forma más rápida, barata y precisa que los seres humanos. El término procede de la palabra checa robota, que significa “trabajo obligatorio”; fue empleado por primera vez en la obra teatral de 1921 R.U.R (Robots Universales de Rossum) por el novelista y dramaturgo checo Karel Éapek. Desde entonces se ha empleado la palabra robot para referirse a una máquina que realiza trabajos para ayudar a las personas o efectúa tareas difíciles o desagradables para los humanos
La robótica es la técnica que se utiliza para diseñar y construir robots o aparatos que realizan operaciones o trabajos.
Checa estos cuatro puntos sobre la robótica:
1. La robótica se encarga de diseñar, construir y hasta operar toda clase de robots, algo que aparece en las películas de ciencia ficción como una verdadera solución a los problemas de la vida cotidiana.
2. La robótica permite una producción más eficiente, reducción del desperdicio de material y de costos monetarios, además de mejorar la calidad del producto. Los beneficios de la utilización de robots en cuanto a producción son variados. El primero y el más claro de los beneficios de los robots es la consistencia de la calidad.
3. La robótica tiene aplicaciones en la agricultura y selvicultura, ayuda a discapacitados, en la construcción, en el uso doméstico y en entornos peligrosos. También en el Espacio, en medicina y salud, minería, en el estudio de la vida marina, vigilancia y seguridad. Los beneficios de los robots se dan en todas las actividades del hombre y es una ventana a un futuro próximo no muy lejano de nuestra realidad.